

- 11/09/2023
- Văn hóa & Hoạt động
- admincee
Ngày 07/09/2023, các thành viên của Trung Tâm CEE thuộc Trường Đại học Công Nghệ - Đại học Duy Tân là một trong những team đã tham dự cuộc thi khởi nghiệp SURF 2023 tại thành phố Đà Nẵng. Team đã chứng tỏ được sự khát vọng và sáng tạo của mình trong cộng đồng khởi nghiệp đổi mới sáng tạo với chủ để “Khát vọng Sông Hàn – Khơi nguồn sáng tạo”.

Giảng viên hướng dẫn nhiệt huyết và giải Á quân 1 GO GREEN 2022 cho sinh viên ĐH Duy Tân
- 17/07/2022
- Văn hóa & Hoạt động
- Hà Mỹ Duyên
Dưới sự hướng dẫn của giảng viên Nguyễn Phạm Công Đức, E.E.E.E Team - nhóm sinh viên Đại học (ĐH) Duy Tân - đã xuất sắc được trao giải Á quân 1 tại cuộc thi Schneider Go Green 2022.

ĐH Duy Tân chính thức đào tạo trình độ Tiến sĩ 3 ngành Vật lý năm 2022
- 17/07/2022
- Văn hóa & Hoạt động
- Hà Mỹ Duyên
Đại học (ĐH) Duy Tân đã chính thức được Bộ GD-ĐT cấp phép đào tạo trình độ Tiến sĩ 3 ngành thuộc lĩnh vực Vật lý gồm: Vật lý lý thuyết và Vật lý toán, Vật lý chất rắn cùng Vật lý nguyên tử và hạt nhân.

Energy-Efficient Unmanned Aerial Vehicle (UAV) Surveillance Utilizing Artificial Intelligence (AI)
- 15/07/2022
- Văn hóa & Hoạt động
- Hà Mỹ Duyên
Recently, unmanned aerial vehicles (UAVs) enhance connectivity and accessibility for civilian and military applications. A group of UAVs with onboard cameras usually monitors or collects information about designated areas. The UAVs can build a distributed network to share/exchange and to process collected sensing data before sending to a data processing center. A huge data transmission among them may cause latency and high-energy consumption. This paper deploys artificial intelligent (AI) techniques to process the video data streaming among the UAVs. Thus, each distributed UAV only needs to send the certain required information to each other. Each UAV processes data utilizing AI and only sends the data that matters to the others. The UAVs, formed as a connected network, communicate within a short communication range and share their own data with each other. The convolution neural network (CNN) technique extracts feature from images automatically that the UAVs only send the moving objects instead of the whole frames. This significantly reduces redundant information for either each UAV or the whole network and saves a huge energy consumption for the network. The UAVs can also save energy for their motion in the sensing field. In addition, a flocking control algorithm is deployed to lead the group of UAVs in the working fields and to avoid obstacles if needed. Simulation and experimental results are provided to verify the proposed algorithms in either AI-based data processing or to control the UAVs. The results show promising points to save energy for the networks.

150 doanh nghiệp tham gia tuyển dụng tại “Tuần lễ Việc làm DTU 2022”
- 15/07/2022
- Văn hóa & Hoạt động
- Hà Mỹ Duyên
(NLĐO) – Diễn ra từ ngày 22 đến hết ngày 26-6, “Tuần lễ Việc làm DTU 2022” sẽ có sự tham gia của 150 doanh nghiệp cùng hơn 2500 vị trí tuyển dụng.

Energy-Efficient Unmanned Aerial Vehicle (UAV) Surveillance Utilizing Artificial Intelligence (AI)
- 17/06/2022
- Nghiên cứu & Chuyển giao CN
- Hà Mỹ Duyên
Recently, unmanned aerial vehicles (UAVs) have enhanced connectivity and accessibility for civilian and military applications. A group of UAVs with onboard cameras usually monitors or collects information about designated areas. The UAVs can build a distributed network to share/exchange and process collected sensing data before sending it to a data processing center. A huge data transmission among them may cause latency and high energy consumption. This paper deploys artificial intelligence (AI) techniques to process the video data streaming among the UAVs. Thus, each distributed UAV only needs to send certain required information to each other. Each UAV processes data utilizing AI and only sends the data that matters to the others. The UAVs, formed as a connected network, communicate within a short communication range, and share their own data. The convolution neural network (CNN) technique extracts features from images automatically that the UAVs only send the moving objects instead of the whole frames.

ĐH Duy Tân lần đầu được Xếp hạng theo QS World University Rankings với 2 Giải thưởng nổi bật
- 17/06/2022
- Văn hóa & Hoạt động
- Hà Mỹ Duyên
Tổ chức giáo dục Quacquarelli Symonds (QS) - Anh Quốc vào sáng ngày 9/6/2022 đã công bố bảng xếp hạng các đại học tốt nhất thế giới năm 2023 (QS World University Rankings 2023). Việt Nam có 5 đại diện lọt vào bảng xếp hạng, trong đó Đại học (ĐH) Duy Tân là trường đại học tư thục đầu tiên và duy nhất của Việt Nam có tên trong bảng xếp hạng này.

Trường Công nghệ - Kỹ thuật của ĐH Duy Tân đào tạo các ngành trọng điểm của kỷ nguyên 4.0
- 16/06/2022
- Văn hóa & Hoạt động
- Hà Mỹ Duyên
Hướng tới chiến lược phát triển sâu và rộng, từ tháng 11-2020, trường Đại học (ĐH) Duy Tân đã bắt đầu thành lập 5 trường thành viên và 2 viện đào tạo.

Preparation of Papers in Two Column Format for the ICSES Transactions and Conferences
- 18/05/2022
- Nghiên cứu & Chuyển giao CN
- Hà Mỹ Duyên
Today, airports are quickly deploying self-service technologies as a generalship to improve passenger experience by reducing service times at all check-in stages. Whereby, one of the important problems in airport areas is the ability to allow a large number of passengers over the airport counters. Many solutions have been proposed, including the application of self-check-in kiosks that allow passengers to check in by themselves without having to go to the counter. In this paper, we present a kiosk design that includes hardware devices and a graphical user interface (GUI) of self-service check-in software based on the analysis of the features and the functions of similar solutions available on the market and a self-check-in software design methodology using web crawling for collecting data from airline’s website that can be applied to many airlines without too much cost or technical challenge in order to decrease the load check-in counters. Our research aim is to propose a low-cost solution that offers new features without providing other solutions, with a focus on improving the efficiency of the check-in process of passengers at the airport.
Robot Navigation Using FPGA Based Moving Object Tracking System
- 18/05/2022
- Nghiên cứu & Chuyển giao CN
- Hà Mỹ Duyên
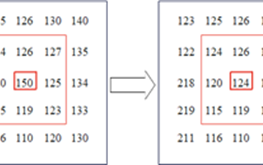
The paper describes an object tracking robot system implemented on FPGA. The system collects real-time object images from the OV7670 camera, the images are passed through the median filter step to enhance image quality. Based on the color (red) the object is separated from the background, proceed to filter the object by mathematical morphological method to remove noise around the object. The (new) coordinates of the object are determined, thereby giving control signals to the robot. Embedded system on FPGA includes MicroBlaze soft processor, hardware IP cores: median filter, color separation, morphological filter. These cores are capable of High-speed pipeline computation and data communication through the DMA Controller enables high data rates whether faster. The entire system was executed in realtime on Xilinx's Spartan-6 FPGA KIT. Keywords—Robot Chasing Objects, FPGAs, Embedded System, Median Filter, Homomorphic Filter, MicroBlaze.