


Chuyển giao
Tin tức về các hoạt động và chuyển giao công nghệ
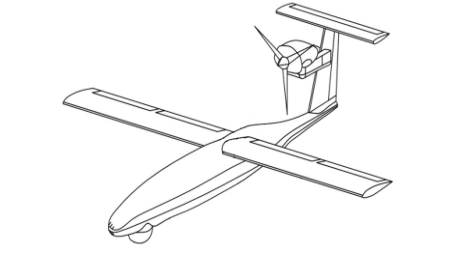
ĐIỀU KHIỂN MỜ CHO MÁY BAY KHÔNG NGƯỜI LÁI CỠ NHỎ
17/12/2021
Trong những năm gần đây thiết bị bay không người lái (UAV) được nghiên cứu và phát triển rất mạnh mẽ, các nghiên cứu về mô hình hóa và điều khiển UAV đã được tăng lên nhanh chóng. Bài báo trình bày về mô hình toán học của UAV dạng cánh bằng trong môi trường nhiễu loạn. Matlab/Simulink được sử dụng để...
Localization of Networked Robot Systems Subject to Random Delay and Packet Loss
06/01/2022
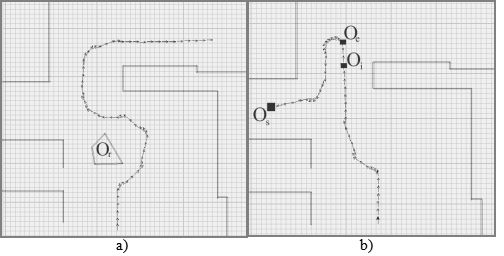
This paper deals with the problem of tracking control of the mobile robot with non-holonomic constraint. A controller with two control loops is designed. The inner loop generates control laws for the tangent and angular velocities to control the robot to follow the target trajectory. It is derived...

A 3D image capture system using a laser range finder for autonomous mobile robots.
12/01/2022
A laser range finder (LRF) can provide a high resolution and accurate data receipt. This paper presents a 3D image capture system, which is built on a 2D range finder SICK-LMS 221 and controlled by a PID servo. The system is interfaced with a computer running Windows. The electronics and software used...
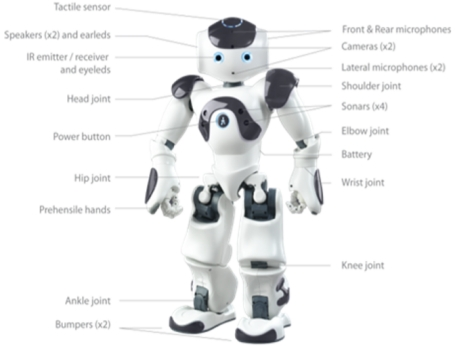
ROBOT APPLICATION IN SUPPORTING ENGLISH TEACHING STUDENTS OF ELECTRICITY
12/01/2022
This article will introduce a humanoid robot (NAO robot - NAO Humanoid Robot) that can be programmed to have the interactive skill, help us build a positive and effective learning environment for students in general and electrical students in particular through real images in the foreign language teaching...
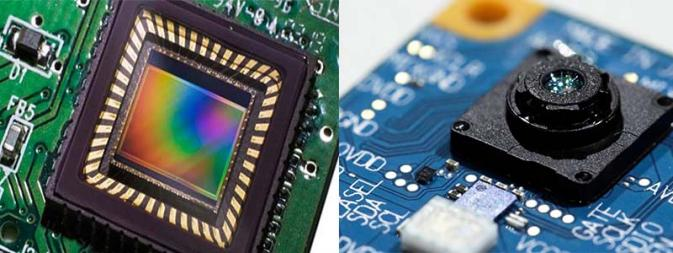
A calibrated distance prediction method from image sensor to human face
15/02/2022
In a system based on human-computer interaction, predicting the distance by computer vision between the camera and the human face is an important operation. To calculate the distance between the camera and the face, an estimation method based on the geometric similarity of two triangles is proposed in...
Nền tảng mới lạ cho hệ thống rô bốt di động dựa trên Internet
17/02/2022
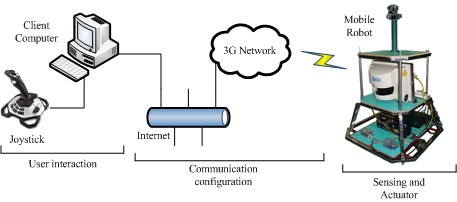
Trong bài báo này, chúng tôi giới thiệu cấu trúc phần mềm và phần cứng cho các hệ thống rô bốt di động trực tuyến. Phần cứng chủ yếu bao gồm một Robot thông minh đa cảm biến được kết nối với Internet thông qua mạng di động 3G. Hệ thống sử dụng kiến trúc phần mềm máy khách-máy chủ, trong đó dữ liệu được...
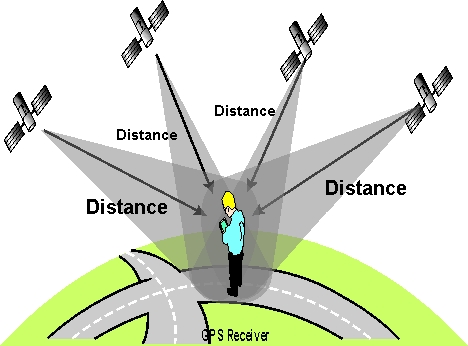
Định vị bằng Camera nhận diện các điểm đánh dấu Marker
15/03/2022
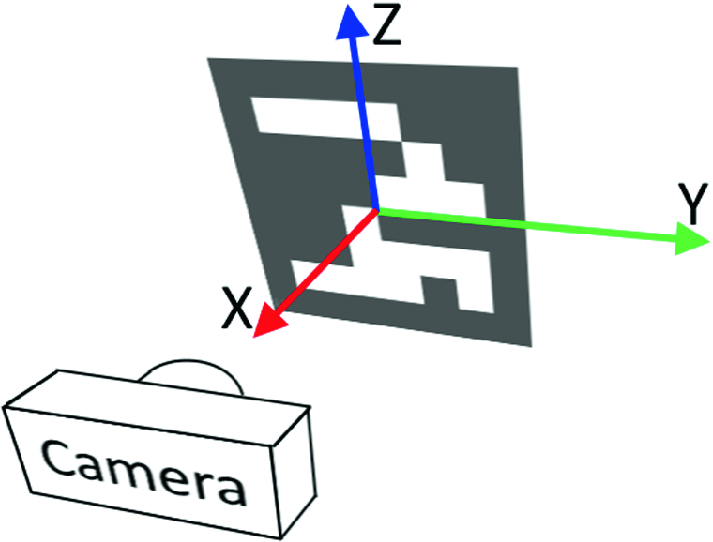
Ước tính vị trí có tầm quan trọng lớn trong nhiều ứng dụng thị giác máy tính: định vị Robot, thực tế ảo và nhiều ứng dụng khác. Quá trình này dựa trên việc tìm kiếm sự tương ứng giữa các điểm trong môi trường thực và phép chiếu hình ảnh 2D của chúng. Đây thường là một bước khó, và do đó, người ta thường...
A Novel Platform for Internet-based Mobile Robot Systems
16/03/2022
In this paper, we introduce a software and hardware structure for online mobile robotic systems. The hardware mainly consists of a Multi-Sensor Smart Robot connected to the Internet through the 3G mobile network. The system employs a client-server software architecture in which the exchanged data between...
GIẢI PHÁP TÍCH HỢP CÁC MÁY XÉT NGHIỆM Y TẾ VÀO HỆ THỐNG PHẦN MỀM QUẢN LÝ BỆNH VIỆN
17/03/2022
Giải pháp tích hợp máy xét nghiệm y tế vào hệ thống phần mềm quản lý bệnh viện là giải pháp kết nối, truyền tải dữ liệu nhờ thiết bị kết nối phần cứng và phần mềm kết nối giữa thiết kế tương thích. giữa quá trình đọc dữ liệu từ máy xét nghiệm và chuyển vào cơ sở dữ liệu trên máy chủ của hệ thống phần...
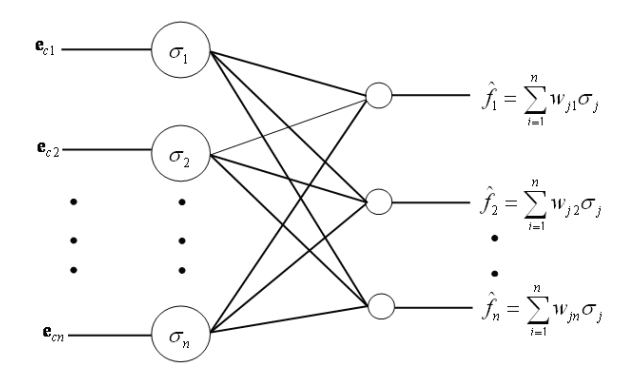
Trajectory Tracking Control of the Nonholonomic Mobile Robot using Torque Method and Neural Network
17/04/2022
This paper deals with the problem of tracking control of the mobile robot with non-holonomic constraints. A controller with two control loops is designed. The inner loop generates control laws for the tangent and angular velocities to control the robot to follow the target trajectory. It is derived based...