


Chuyển giao
Tin tức về các hoạt động và chuyển giao công nghệ

Công nghệ của năm 2015: Cảm biến vân tay
22/12/2015
Cảm biến vân tay trên điện thoại lần đầu gây được sự chú ý mạnh mẽ là vào năm 2013, khi mà Apple đưa nó lên iPhone 5s. Kể từ đó thì công nghệ này đã trở thành một thứ thiết yếu, cho đến năm 2015 thì nó được xem như một "tính năng" không thể không có trên các smartphone cao cấp. Và không có gì quá khó...

Robot của Đại Học Duy Tân chạy thử nghiệm tại Sân bay Đà Nẵng
13/04/2021
Các nhà khoa học của Trung tâm Điện - Điện tử (CEE) thuộc Đại học Duy Tân đã đưa robot hướng dẫn hành khách đi máy bay chạy thử nghiệm tại sân bay Đà Nẵng.
DẪN ĐƯỜNG XE TỰ HÀNH DÙNG CẢM BIẾN QUÁN TÍNH VÀ ĐƯỜNG DẪN ẢO
04/10/2021
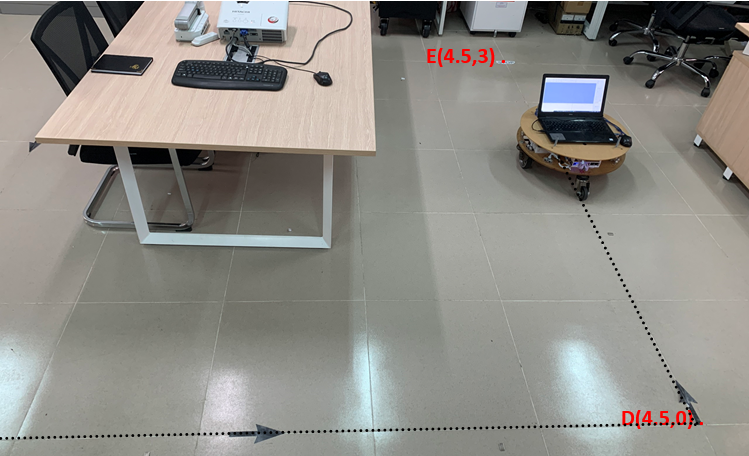
Phương pháp dẫn đường là một yếu tố rất quan trọng quyết định đến sự linh hoạt và chính xác của xe tự hành trong các môi trường hoạt động khác nhau. Với mỗi phương pháp dẫn đường chúng ta có các phương pháp xác định vị trí và góc hướng của xe khác nhau. Trong nghiên cứu này, góc hướng và vị trí của xe...

A Framework of Formation Control Algorithms Applying to Multiple Unmanned Aerial Vehicles
05/10/2021
Trong thời gian gần đây, hệ thống nhóm máy bay không người lái (UAV) được ứng dụng mạnh mẽ trong nhiều ứng dụng. Do vậy, các lĩnh vực nghiên cứu nhằm tăng hiệu quả hoạt động của nhóm UAV như truyền thông, phân bổ nhiệm vụ, phối hợp hợp tác,v.v. được đẩy mạnh quan tâm nghiên cứu. Trong đó, điều khiển...
MẠNG UAV DỰA TRÊN BLOCKCHAIN TRONG CÁC ỨNG DỤNG THỰC TẾ
05/10/2021
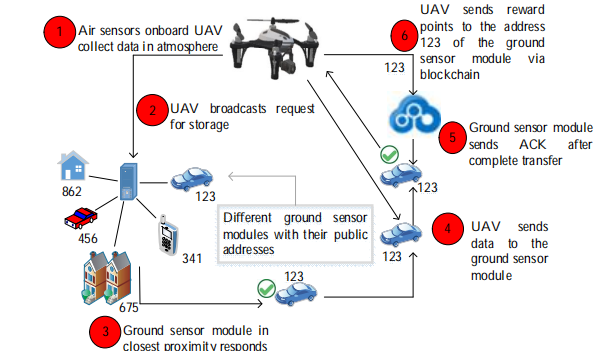
Công nghệ Blockchain đang phát triển ngày một mạnh mẽ và nó có thể được tích hợp vào nhiều hệ thống, cụ thể là mạng Robot di động, mạng UAV (máy bay không người lái) với các dịch vụ AI. Tuy nhiên, đây là một công nghệ mới, vì vậy nó vẫn là một lĩnh vực được rất nhiều nhà khoa học quan tâm. Trong bài...

KIỂM SOÁT HÌNH THÀNH DỰA TRÊN TRÍ TUỆ NHÂN TẠO ĐỐI VỚI HỆ THỐNG ĐA ROBOT: MỘT KHẢO SÁT
07/10/2021
Trong những năm gần đây, điều khiển hình thành hệ thống muti-rô bốt trở thành một chủ đề nghiên cứu tích cực nhận được nhiều sự quan tâm của các nhà khoa học do những ưu điểm vượt trội của chúng so với các hệ thống thông thường khác. Kiểm soát hình thành là một trong những công nghệ quan trọng để đạt...
Thiết kế các thuật toán di truyền dựa trên điều khiển cấp cao hơn cho các nhà máy xử lý nước thải
07/10/2021
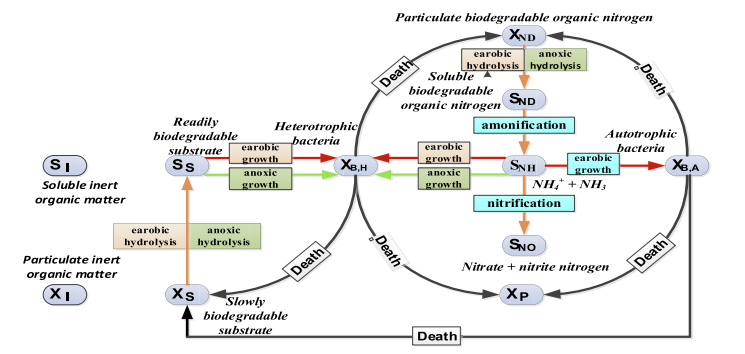
Một nhà máy xử lý nước thải tạo điều kiện thuận lợi cho các quy trình khác nhau (ví dụ: vật lý, hóa học và sinh học) để xử lý nước thải công nghiệp và loại bỏ các chất ô nhiễm. Chủ đề này gần đây khuyến khích nhiều sự chú ý trong các lĩnh vực khác nhau để khám phá các phương pháp phù hợp để có thể loại...
Dẫn đường và tránh vật cản cho robot di động dựa trên ảnh laser 3D và siêu âm
17/11/2021
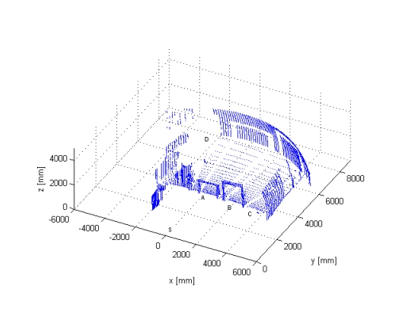
Bài báo trình bày việc sử dụng hệ đo đa cảm biến với các sensor đo xa laser và siêu âm để thực hiện việc dẫn đường và tránh vật cản cho robot di động tự trị trong nhà. Hệ thống có khả năng thu nhận được hình ảnh 3D của môi trường gồm cả chiều cao của không gian. Từ đám mây dữ liệu các điểm ảnh ba chiều...
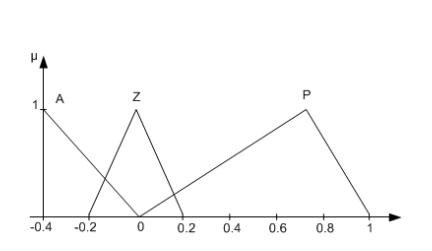
SỬ DỤNG BỘ LỌC KALMAN MỞ RỘNG THÍCH NGHI KẾT HỢP LOGIC MỜ CHO VÀI TOÁN ĐỊNH VỊ ROBOT DI ĐỘNG
08/12/2021
Một trong những bài toán quan trọng trong bài toán dẫn đường cho robot di động là bài toán định vị robot. Bài báo trình bày vấn đề sử dụng bộ lọc Kalman mở rộng thích nghi dựa trên logic mờ (FL-EKF) để tăng hiệu quả cho vấn đề định vị robot di động hoạt động trong môi trường trong nhà chưa biết trước....
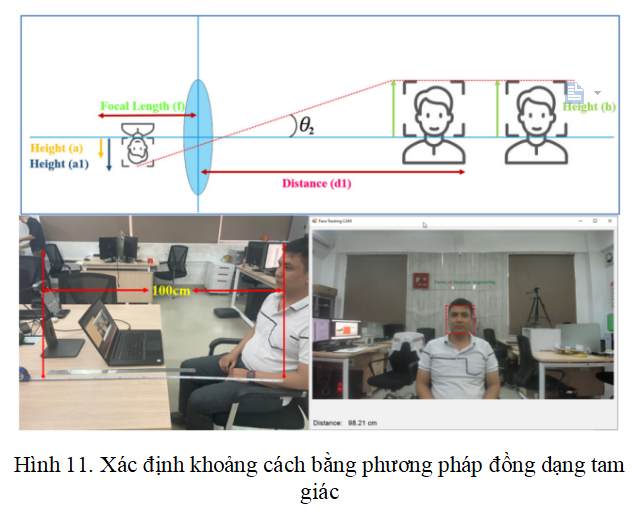
MỘT PHƯƠNG PHÁP DỰ ĐOÁN KHOẢNG CÁCH CÓ HIỆU CHUẨN TỪ CẢM BIẾN ẢNH ĐẾN MẶT NGƯỜI
08/12/2021
Trong một hệ thống dựa trên sự tương tác giữa con người và máy tính, dự đoán khoảng cách bằng thị giác máy tính giữa máy ảnh và khuôn mặt người là một hoạt động quan trọng. Để tính toán khoảng cách giữa máy ảnh và khuôn mặt, một phương pháp ước tính dựa trên tính chất đồng dạng hình học của hai tam giác...