


Localization of Networked Robot Systems Subject to Random Delay and Packet Loss
- INTRODUCTION
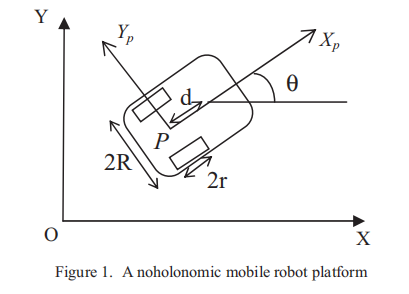
Controlling a mobile robot to follow a predefined trajectory is a challenging task due to the nonlinear chacteristic and nonholonomic constraint of the robot. According to Brocket theory, a nonholonomic system is not able to be asymptotically stable using the smooth and time invariant control laws. Some methods to stablize the nonholonomic system through feedback control have been proposed. They however often assume ideal conditions. Others focus on determining uncertainties in measurements and model parameters and try to fix them by using hybrid feedback control or velocity chart control. These methods are usually complex and difficult to implement. Our approach is the use of Lyapunov function technique to design a stable controller for nonholonomic systems [1],[2]. The goal is the optimization in motion of the robot during the path following process. From the robot kinematics, the uncertainties in system parameters are determined and compenstated by the implementation of an extended Kalman filter. But this stage only focuses on the kinematics while the dynamics parameters such as the robot’s load which plays an important role in the stable of the robot are not concerned. In addition, non-parameter uncertainties such as high frequency unmodeled dynamics, actuator dynamics, structural vibrations, measurement noises, computstion roundoff error, and sampling delay also need be considered. Thus, the problem of kinematics and dynamics control of nonholonomic system is challenging. A number of approaches to control the system with nonholonomic constraint have been introduced [3],[4],[6]. In [9-16], authors were combined the dynamics model of the mobile robot to the kinematics controller with nonholonomic constraint. However, we find it difficult to implement closely the dynamics model of the mobile robot due to the non-quantified parameters of dynamics as well as the usually-variable robot’s load. These errors are mainly caused by the uncertainties of such a model and the non parameters, which is composed of: 1-high frequency unmodeled dynamics, such as actuator dynamics or structral vibrations; 2- measurement noise; 3-computation roundoff error and sampling delay. Thus, the problem of kinematics and dynamics control of non-holonomic system isabsolutely challenging. The typical method is to solve this is considered as “adaptive control”. For example, thebackstepping method of Wang et al. [17] and R.Fierro et al. [18], the sliding-mode techniques in [19-20], were applied to reduce sway for an offshore container crane. These methods also implemented neural network to compensate the uncertainties such as the combination between the backstepping method and the neural network in [9,11]. In [21], a combination between the RBFNN controller and the sliding-mode techniques for the path following task of an omnidirectional wheeled mobile manipulators was applied. The asymptotically stabilization were proven theoretically and experimentally. In [9], the author presented a control method using neural network in which online learning law of weight factors is used to compensate the uncertainties caused by error in dynamics model. If the dynamics model contains non-parameter uncertainties, the asymptotically stabilization is then not assured. In this paper, the tracking control algorithm based on the torque method is presented. The controller is of feedforward being in combination with proportional type. The non- parameter uncertainties and dynamics model errors are compensated by using the RBFNN. The asymptotic stabilization of the whole system is proven by the Lyapunov theory.Our main job is that the splitting of the path following tasks into two independent control loops. The outer loop isemployed to control the kinematics such as the determination of tangent and angular velocities so that the errors in position and direction go toward zero (globally asymptotically stabilization according to the Lyapunov theory); output of this controller is sent to the inner control loop. The inner control loop is used to control the dynamics. output of this controller is sent to the inner control loop. The inner control loop is used to control the dynamics. In this control loop. This controller is designed by the combination between the feedforward, the scale techniques, and compensated-nonparameter-RBFNN type. The paper is organized as follows. Section 2 briefly is introduced the kinematics and dynamics of the mobile robot. Section 3 is described the process to design the controller. Section 4 is presented the simulation results and finally is section 5.2. THE KINEMATICS AND DYNAMICS OF NONHOLONOMIC MOBILE ROBOTA typical example of a nonholonomic mobile robot is shown in Fig. 1 [9-11].
 Prom [9-10], we have:
Prom [9-10], we have: where
where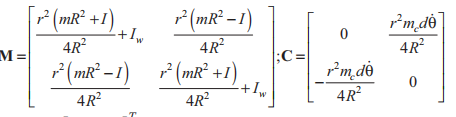 We can rewrite the system dynamic Eq.(1) into a linear form, [9]:
We can rewrite the system dynamic Eq.(1) into a linear form, [9]: known robot dynamics, such as mass and moment of inertia; Y(Ȧ ,Ȧ) is a 2x3 coefficient matrix consisting of the known functions of the robot velocity Ȧ and acceleration Ȧ which is referred as the robot regressor. For the mobile robot shown in fig.1, we could easily compute:
known robot dynamics, such as mass and moment of inertia; Y(Ȧ ,Ȧ) is a 2x3 coefficient matrix consisting of the known functions of the robot velocity Ȧ and acceleration Ȧ which is referred as the robot regressor. For the mobile robot shown in fig.1, we could easily compute: 3. THE CONTROLLER DESIGNA. Outer control loopLet the tangent and angular velocities of the robot be v andω respectively. We have:
3. THE CONTROLLER DESIGNA. Outer control loopLet the tangent and angular velocities of the robot be v andω respectively. We have: The target of the control problem is to design an adaptive control law in which the position vecctor q and thevelocity q to hold the position vector r q (t) and the demanded velocity r q (t) in terms of unknown dynamics parameters of the mobile robot. The desired position and velocity vectors are represented:
The target of the control problem is to design an adaptive control law in which the position vecctor q and thevelocity q to hold the position vector r q (t) and the demanded velocity r q (t) in terms of unknown dynamics parameters of the mobile robot. The desired position and velocity vectors are represented: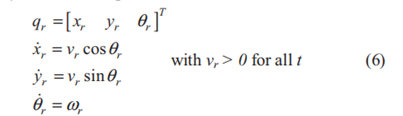 The position tracking error between the reference and the actual robot could be expressed in the mobile robot’scoordinator as follows [9-10]:
The position tracking error between the reference and the actual robot could be expressed in the mobile robot’scoordinator as follows [9-10]: In this paper, we choose the control law for ν, ω like:
In this paper, we choose the control law for ν, ω like: 4. SIMULATION RESULTSIn our scenario, we simulates the mobile robot model with the following paramters: r = 0.15m; R= 0.75m; d=0.2m; mc = 30kg; mw = 30kg; Ic = 15.625 kgm2 ; Iw = 0.0005kgm2 ; Im = 0.0025 kgm2 . The parameters of the controller are: KD = diag(5,5); k1=k3=2; δ = 10. Suppose that we only estimate pˆ = 0.6 p and non-parametric uncertainty components.The simulation results are presented in below figures: A. Using the neural network with the parameter estimation algorithm of dynamics model:
4. SIMULATION RESULTSIn our scenario, we simulates the mobile robot model with the following paramters: r = 0.15m; R= 0.75m; d=0.2m; mc = 30kg; mw = 30kg; Ic = 15.625 kgm2 ; Iw = 0.0005kgm2 ; Im = 0.0025 kgm2 . The parameters of the controller are: KD = diag(5,5); k1=k3=2; δ = 10. Suppose that we only estimate pˆ = 0.6 p and non-parametric uncertainty components.The simulation results are presented in below figures: A. Using the neural network with the parameter estimation algorithm of dynamics model: 5. CONCLUSIONThis paper proposes a control method for trajectory tracking of nonholonomic mobile robot. The main contribution is the proposal of a controller with two control loops. One is for the kinematics. The other is for the dynamics. In addition, a neural network is introduced to deal with uncertainties of the dynamics model. The global stability of the system is proven. The simulation results confirmed the effectiveness of the method.TS. Trần Thuận Hoàng
5. CONCLUSIONThis paper proposes a control method for trajectory tracking of nonholonomic mobile robot. The main contribution is the proposal of a controller with two control loops. One is for the kinematics. The other is for the dynamics. In addition, a neural network is introduced to deal with uncertainties of the dynamics model. The global stability of the system is proven. The simulation results confirmed the effectiveness of the method.TS. Trần Thuận Hoàng
Tin khác:
- Công nghệ của năm 2015: Cảm biến vân tay
- Robot của Đại Học Duy Tân chạy thử nghiệm tại Sân bay Đà Nẵng
- DẪN ĐƯỜNG XE TỰ HÀNH DÙNG CẢM BIẾN QUÁN TÍNH VÀ ĐƯỜNG DẪN ẢO
- A Framework of Formation Control Algorithms Applying to Multiple Unmanned Aerial Vehicles
- MẠNG UAV DỰA TRÊN BLOCKCHAIN TRONG CÁC ỨNG DỤNG THỰC TẾ