


Nghiên cứu & Chuyển giao
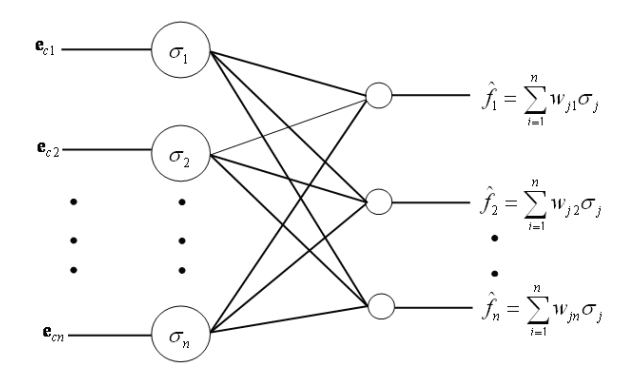
Trajectory Tracking Control of the Nonholonomic Mobile Robot using Torque Method and Neural Network
17/04/2022
This paper deals with the problem of tracking control of the mobile robot with non-holonomic constraints. A controller with two control loops is designed. The inner loop generates control laws for the tangent and angular velocities to control the robot to follow the target trajectory. It is derived based...
Robot Navigation Using FPGA Based Moving Object Tracking System
18/05/2022
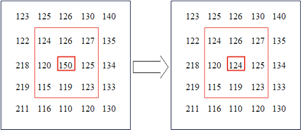
The paper describes an object tracking robot system implemented on FPGA. The system collects real-time object images from the OV7670 camera, the images are passed through the median filter step to enhance image quality. Based on the color (red) the object is separated from the background, proceed to...

Preparation of Papers in Two Column Format for the ICSES Transactions and Conferences
18/05/2022
Today, airports are quickly deploying self-service technologies as a generalship to improve passenger experience by reducing service times at all check-in stages. Whereby, one of the important problems in airport areas is the ability to allow a large number of passengers over the airport counters. Many...
Energy-Efficient Unmanned Aerial Vehicle (UAV) Surveillance Utilizing Artificial Intelligence (AI)
17/06/2022
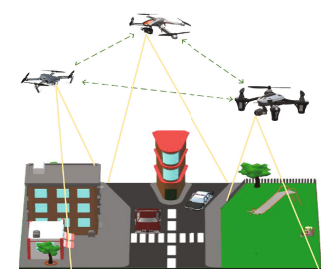
Recently, unmanned aerial vehicles (UAVs) have enhanced connectivity and accessibility for civilian and military applications. A group of UAVs with onboard cameras usually monitors or collects information about designated areas. The UAVs can build a distributed network to share/exchange and process collected...
